Deep RL for Differential Drive Robot
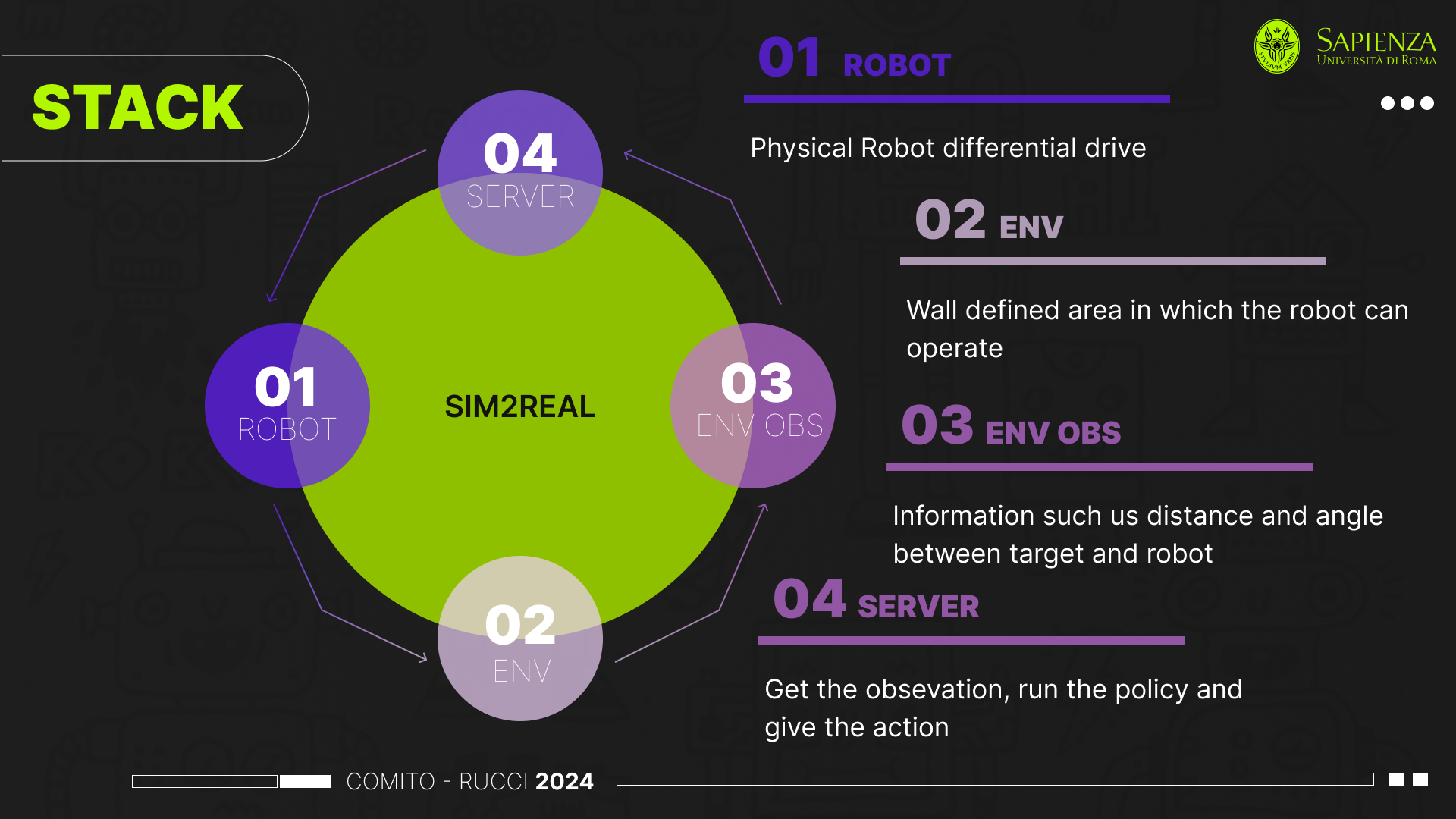
Project developed for the 2024 class of Reinforcement Learning. During this project we built form scratch a differential drive robot based on Arduino + Raspberry Pi implementing a PPO based policy to control it. The goal of the robot was to successfully reach the target and avoiding obstacles in the path. The only informations given were about the distance and angle from with respect to the target and the information coming from the distance sensors.
Robot in action
Architecture developed for the robot