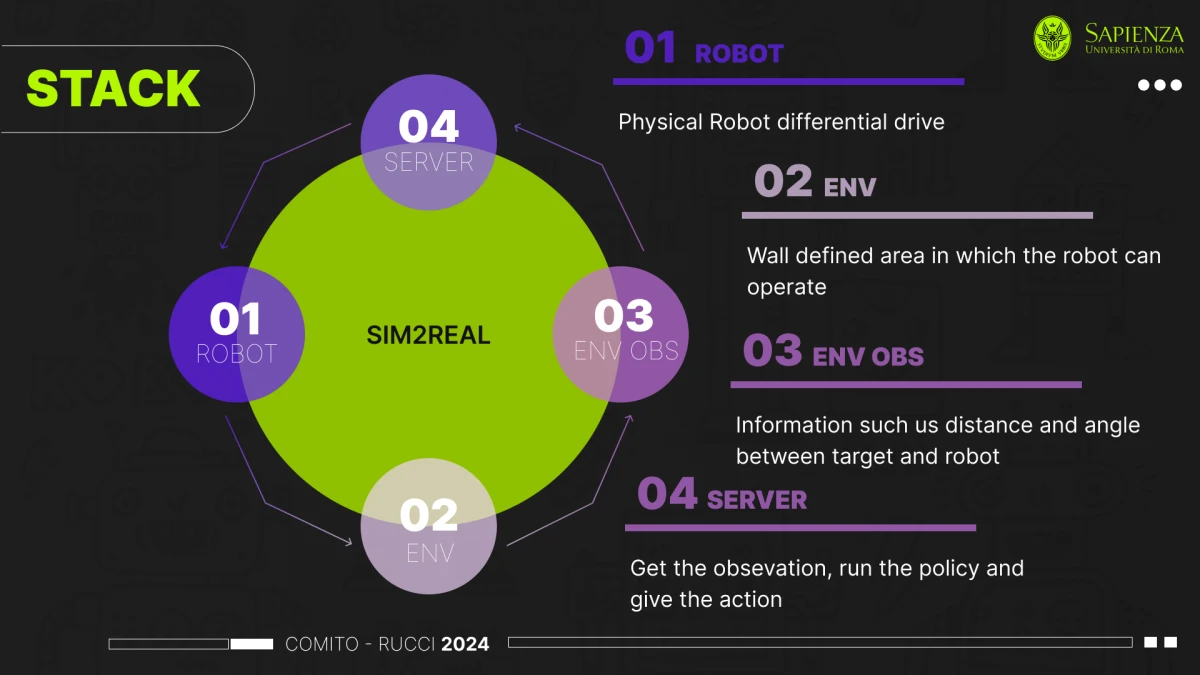
This project was developed for the 2024 Reinforcement Learning class. We built a differential drive robot from scratch with Arduino and Raspberry Pi, then implemented a PPO-based policy to control it. The robot's objective was to reach a target while avoiding obstacles using only distance, angle-to-target, and distance-sensor observations.
Robot in action
Architecture developed for the robot